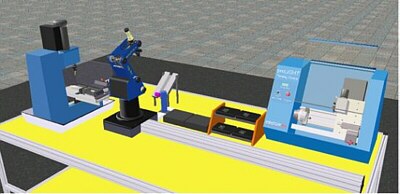
 Módulo robótico base que se puede ampliar hasta formar una celda de manufactura flexible FMS
Módulo robótico base que se puede ampliar hasta formar una celda de manufactura flexible FMS
-
Pedir Cotización
Dimensiones del embalaje: 0,5 x 0,8 x 1,2 m. Peso Bruto: 41 kg
 Módulo robótico base que se puede ampliar hasta formar una celda de manufactura flexible FMS
Módulo robótico base que se puede ampliar hasta formar una celda de manufactura flexible FMS
Dimensiones del embalaje: 0,5 x 0,8 x 1,2 m. Peso Bruto: 41 kg
 Solución completa de pequeño/mediano porte:
Solución completa de pequeño/mediano porte:
Dimensiones del embalaje: 0,68 x 0,51 x 0,38 m. Peso Bruto: 35 kg
Dimensiones del embalaje: 0,26 x 0,21 x 0,11 m. Peso Bruto: 1 kg

Dimensiones del embalaje: 0,9 x 0,32 x 0,18 m. Peso Bruto: 4 kg

Dimensiones del embalaje: 0,25 x 0,2 x 0,01 m. Peso Bruto: 0,5 kg

Dimensiones del embalaje: 0,37 x 0,24 x 0,18 m. Peso Bruto: 4 kg
Dimensiones del embalaje: 0,3 x 0,2 x 0,02 m. Peso Bruto: 0,5 kg
 Manual (pdf)
Manual (pdf)
Referencia y programación (en Castellano)