- Sistema completo: sólo precisará agregar una PC que tenga Matlab coder y Simulink coder corriendo bajo Windows
- Temática abordada en el manual (en idioma Inglés):
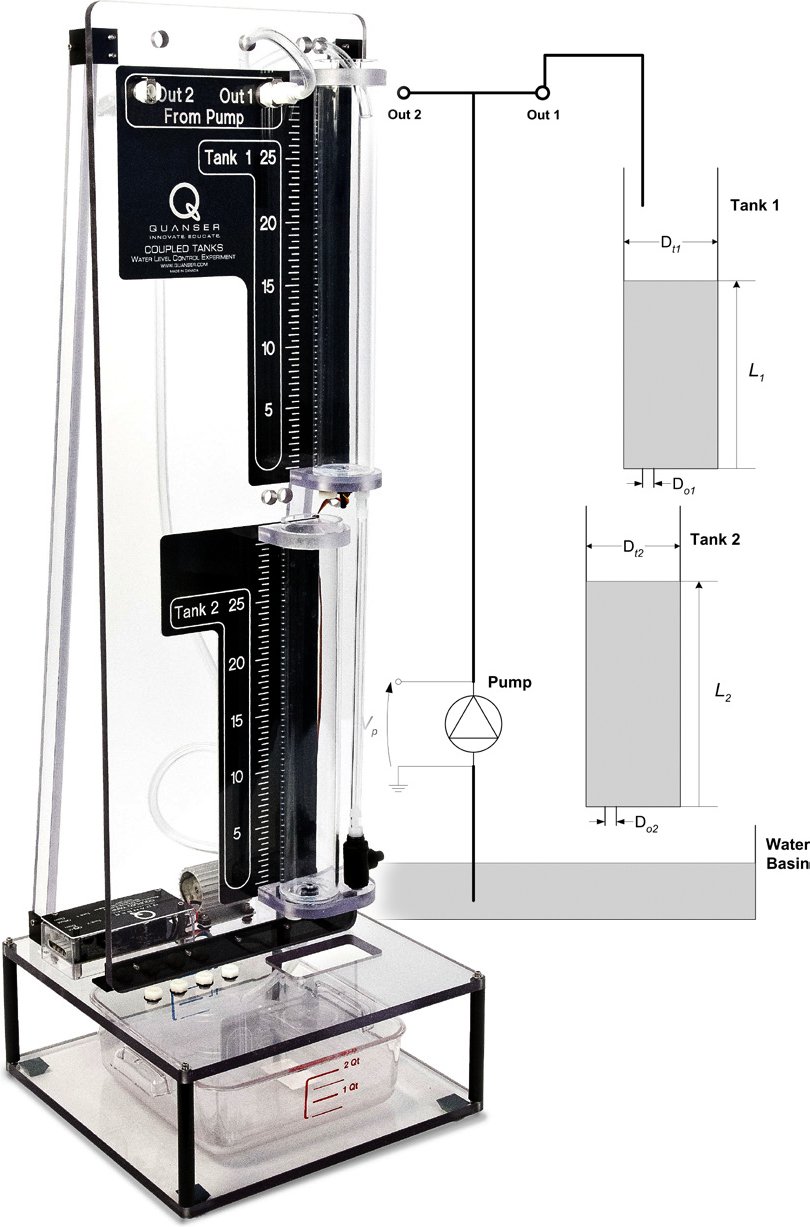
- Derivación del modelo dinámico a partir de los principios físicos
- Representación de la función de transferencia
- Linealización
- Control de nivel
- Control de 3 términos PID
- Feed-forward
- Sintonía de los parámetros de control
- El hardware provisto permite también abordar otras temáticas, pero estas no están descriptas en el manual didáctico
- Documentación completa y arquitectura abierta, que permite a los usuarios implementar sus propios controladores o acoplarlo a hardware y software de terceros, tales como LabVIEW de National Instruments o MATLAB/Simulink
-
Pedir Cotización
Peso Bruto: 6,6 kg

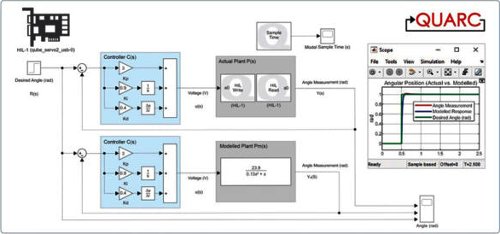
Presentación del software QUARC con el que se controla esta planta
Trabajo experimental con 2 de estas unidades acopladas en un sistema muy inestable de 4 tanques
Trabajo de proyecto con esta unidad trabajando bajo el control de un PLC