Transductores, Servocontrol, Instrumentación y Control de Procesos
Sistemas completos y módulos individuales dedicados al estudio de las características de diversos transductores, el acondicionamiento de las señales que producen y varias de sus aplicaciones prácticas
COM3Lab Base Módulo base para todas las placas COM3Lab: instrumentación, preprocesamiento de señales, comando y alimentaciónCOM3Lab Soft Software operativo p/la familia COM3Lab: teoría, trabajos prácticos, instrumentación virtual y multimediaCOM3Lab Transd Placa p/prácticas con TransductoresCOM3Lab Ctrol 1 Placa p/prácticas Básicas con Sistemas de Control de ProcesosCOM3Lab Ctrol 2 Módulo adicional p/prácticas Avanzadas con Sistemas de Control de ProcesosTK2942-001 Conjunto para el estudio detallado de transductores33-033 Entrenador sobre Fundamentos de Servomecanismos Analógicos y Digitales33-008-PCI Sistema Modular p/Servocontrol de Precisión c/conexión a MatlabQUBE-SERVO-2-USB Exp Módulo para la enseñanza de Mecatrónica y Control con ServomotoresAERO MIMO Módulo MIMO para la enseñanza avanzada de Mecatrónica, Servocontrol y Dinámica AeroespacialQUARC for Windows Módulo de control en tiempo real p/vincular hardware de Quanser con MATLAB/Simulink. Licencia para 1 puesto de trabajo38-001 Planta para la Enseñanza de Control de Procesos con control de Nivel y Caudal38-002 Planta para la Enseñanza de Control de Procesos con control de temperatura38-003 Planta para la Enseñanza de Control de Procesos con control de nivel, caudal y temperatura38-004 Planta para la Enseñanza de Control de Procesos con control de presión33-041 Sistema SISO/MIMO p/prácticas de Control No Lineal con tanques acoplados p/usar c/Matlab y Simulink
Sobre esta unidad se montan todas las placas de la familia COM3Lab
Instrumentos virtuales que se presentan en consonancia con las necesidades de c/placa de Trabajo Práctico
Osciloscopio, 4 canales con entradas diferenciales, 2 MS/s, 12 bit, buffer 2K, entrada de trigger externo
2 multímetros digitales: Vcc/ca 2/20V , Icc/ca 0,2/2A, R 2/20/200 kOhm/2MOhm
Analizador digital de 8 bit, h/2 MS/s, memoria: 2048 palabras de 8 bit, disparo con cualquier combinación de palabras
Generador de funciones hasta 20 Vpap/ 250 mA/ 100 kHz: senoidal, cuadrada, triangular, CC
Frecuencímetro
Analizador de espectros
Trazador de curva característica
Control y analizador de conversores e inversores
Multiplexor p/registrar 4 tensiones y 4 corrientes en sistemas trifásicos
Los instrumentos de medición son reales aún cuando su ajuste y presentación de resultados se ejecutan por software
Interfaz USB integrada para instrumentos de medición externos (consultar compatibilidades)
LEDs indicadores del estado
Dos salidas de audio separadas para que dos estudiantes puedan trabajar con la unidad maestra simultáneamente
Interfaces a PC, notebooks o tablets:
Ethernet 100 Mbits RJ45
WiFi
USB
Traba de seguridad para ajustar las tarjetas de experimentación
Puerto para traba antihurtos Kensington
Bahía para acomodar tablets de 8 a 10 pulgadas
Conector USB en cascada para cargar baterías de tablets y celulares
Complementos recomendados:
Juego de cables patch rematados en fichas banana de 2 mm 700022 ó 6890600
Una o más de las placas COM3Lab
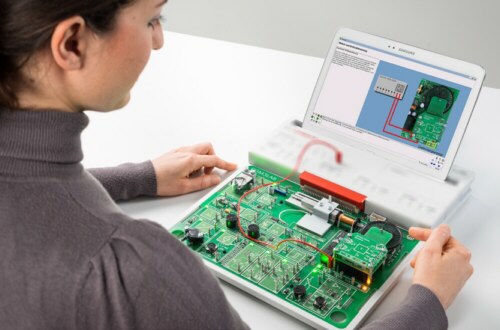
Se utiliza con el Módulo Base y todas las placas de la familia COM3Lab
Debido a la preparación clara y coherente del contenido, el software de aprendizaje ofrece orientación clara e inequívoca durante los trabajos prácticos
Cada tema comienza con una introducción teórica y continua con al menos un experimento práctico relevante
Incluye un test de autoevaluación al cierre de cada tema
Soporte multimedia con animaciones, videos, audio e instrumentos de medición reales con display virtual
Adecuado para el aprendizaje y la experimentación individual o en grupos de trabajo
Para una mejor documentación, las páginas de los cursos pueden ser guardadas e impresas, como PDF o XPS
Los resultados de las mediciones pueden ser exportados a Word y Excel
Requiere Windows 7 o posterior
Este software es gratuito y se puede bajar desde el sitio del fabricante http://www.ld-didactic.de/en/service/software-download/com3lab-software.html
Si la computadora utilizada tiene conectado un Módulo Base se instalará la versión completa , con todas las bibliotecas de trabajos prácticos disponibles
Si la computadora utilizada no tiene conectado un Módulo Base, podrá acceder a las funciones principales con el usuario y contraseña: demo / demo
Módulo para utilizar con la base COM3LAB Base y su software asociado COM3LAB Soft
En el software están incluidos trabajos prácticos para abordar en profundidad los siguientes temas:
Circuitos electrónicos para la medición de la temperatura
Función y características de diferentes sensores de temperatura: Pt100, NTC, KTY y termocupla
Función y características de los sensores de presión
Medición de fuerzas con bandas extensométricas
Medición de fuerzas con barra de flexión
Medición del desplazamiento, el ángulo y la velocidad
Mediciones con codificador óptico
Sensores de efecto Hall
Incluye:
Medición de par con bandas extensométricas sobre celda
Sensores de temperatura: Pt 100,NTC, KTY, termocupla
Elemento de Peltier para registrar las características de temperaturas de aprox. 0° a 50°
Sensor de presión diferencial
Trasductor de desplazamiento óhmico
Trasductor de desplazamiento capacitivo
Trasductor de desplazamiento inductivo
Posicionamiento mediante el sensor Hall y el conmutador de lengüetas
Sensor de ultrasonido con receptor
Medición de la intensidad luminosa mediante fotodiodos.
Sensor de efecto Hall
Sensor óptico
Fuente de corriente regulable
Medición con líneas compensadas: 2, 3 y 4 conductores
1 Amplificador de medición universal
1 Sensor de presión con indicador
1 dinamómetro
Complementos recomendados:
Juego de accesorios COM3Lab Transd Acc
Juego de conectores patch rematados en fichas banana de 2 mm
Módulo para utilizar con la base COM3LAB Base y su software asociado COM3LAB Soft
En el software están incluidos trabajos prácticos para abordar en profundidad los siguientes temas:
Control de lazo abierto
Control de lazo cerrado
Análisis de los sistemas de control
Sistemas de control con/sin compensación
Sistemas de control de orden superior
Control P, I, PI, PID, y PD
Control digital directo (DDC)
Criterios de desempeño para el control automático
Pautas de optimización de los controladores PID
Control automático de temperatura
Control automático de velocidad
Control automático de iluminación
Control automático de sistemas sin compensación
Control automático con controladores discontinuos
Simulación de fallos
Incluye:
Controlador analógico
Puntos de suma con entradas de perturbación
Controlador digital
Elemento de tiempo muerto
Fuentes de señal de corriente continua 1V, 5V, 10V
Elemento de acción proporcional
2 elementos de tiempo muerto de primer orden
Elemento de acción integral, reajustable
Elemento de característica no lineal
Sistema de control de velocidad con sensor de velocidad óptico
Sistema de control de temperatura con sensor de temperatura KTY
Sistema de control de luz con sensor de fotodiodos y fuente de luz externa (fuente de perturbación)
Complemento recomendado: juego de conectores patch rematados en fichas banana de 2 mm
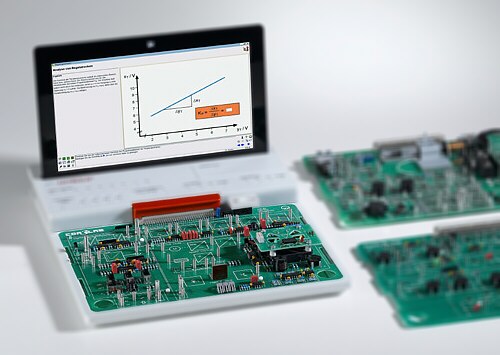
Módulo para utilizar con la base COM3LAB Base , el módulo COM3LAB Ctrol 1 y su software asociado COM3LAB Soft
En el software están incluidos trabajos prácticos para abordar en profundidad los siguientes temas:
Introducción
Estabilidad de los sistemas de control automático
Diseño de un controlador según el método de Ziegler / Nichols
Sistemas con tiempo muerto
Limitación de la variable manipulada
Control en cascada
Introducción a la respuesta en frecuencia
Respuesta en frecuencia de elementos básicos
Respuesta en frecuencia de elementos combinados
Diseño de un controlador en el dominio de la frecuencia
Control difuso
Control adaptivo
Experimentos con sistemas de control externo
Complemento recomendado: juego de conectores patch rematados en fichas banana de 2 mm
Amplio rango de magnitudes medidas
Permite estudiar en detalle los métodos de acondicionamiento de señales más utilizados en entornos industriales
Cada transductor se puede utilizar individualmente o integrado en un conjunto
El manual de usuario (en idioma Inglés) sugiere y describe en detalle un total de 28 clases, incluyendo:
Tratamiento teórico de c/tema
Consideraciones e implicancias de índole práctica
Trabajo práctico
Preguntas y discusión posterior
¡Garantía Extendida 2 años!
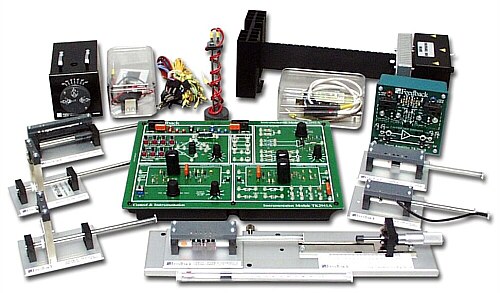
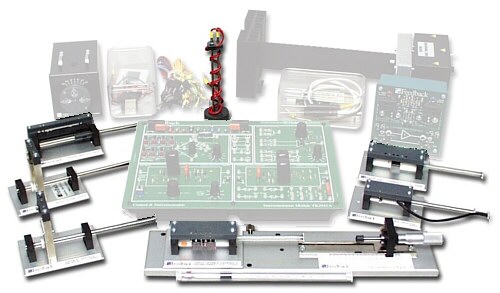
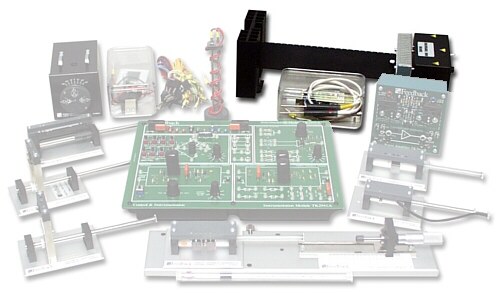
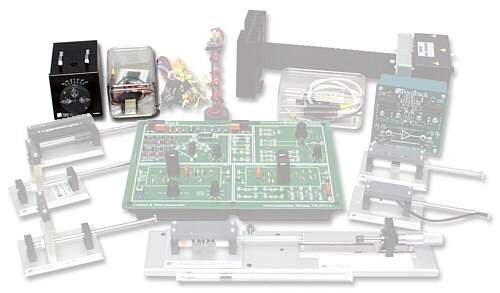
Constitución
Conjunto de transductores electromecánicos TK2941E
Conjuntos de Transductores de Calor TK2941H
Conjunto de Transductores de Luz TK2941L
Conjunto circuital para mediciones con transductores TK2941M
Fuente de alimentación +5V 1A y +/-15V 1.5A 01-100
Transductores incluidos
Resistor variable lineal
Capacitor de área variable
Capacitor con separación variable
Inductor variable con núcleo de ferrite deslizable
Transformador lineal diferencial variable (LVDT)
Strain gauge
Indicador de profundidad de inmersión (conductividad entre dos barras semi-sumergidas)
Circuitos de tratamiento de señal:
Puente de Wheatstone
Amplificador con operacional y transductor incluido en el lazo de realimentación
Oscilador y discriminador c/amplificador
Este módulo forma parte del conjunto TK2942-001
¡Garantía Extendida 2 años!
Incluye: barra de conducción, disipador, resistores de calefacción, juego de transductores
La barra es sometida a un gradiente de temperatura entre un calefactor eléctrico y un disipador aleteado
El gradiente de temperatura se utiliza para relevar la respuestas de distintos transductores, fijándolos en diversas posiciones a través de un clip:
Termistor
Resistencia de platino
Termocupla
Par bi-metático
El contraste de c/sensor se lleva a cabo contra un termómetro de calibración de mercurio
Los trabajos prácticos sugeridos incluyen algunas actividades de control
Este módulo forma parte del conjunto TK2942-001
¡Garantía Extendida 2 años!
Incluye: lámpara, caja de transductores y juego de filtros cromáticos
La lámpara tiene un zócalo que se puede montar sobre la plataforma de medición de desplazamientos lineales del TK2941E permitiendo relevar curvas de salida vs intensidad
La caja del transductor contiene:
Celda fotoconductora
Foto diodo
Foto transistor
Sistema mecánico para girar cada uno de ellos sobre su eje óptico p/obtener diagramas polares de respuesta
El juego de filtros cromáticos permite obtener diagramas de repuesta espectral
Este módulo forma parte del conjunto TK2942-001
¡Garantía Extendida 2 años!
Módulo de instrumentación
Secciones independientes que se pueden interconectar p/estudiar sistemas más complejos:
Puente de Wheatstone con ramas de valor ajustable (100 Ohm / 1 kOhm / 10 kOhm / 100 k Ohm), potenciómetro de referencia y pulsador de cortocircuito
Amplificador diferencial con ganancias ajustables ( x10 / x10 / x100 / x1000)
Oscilador centrado en 465 kHz
Discriminador de FM
Rectificador sensible a la fase
Amplificador buffer (G=1, Pmáx = 4W)
Este módulo forma parte del conjunto TK2942-001
¡Garantía Extendida 2 años!
Salida 5VCC
+/- 2%
1A
Ripple menor que 400mV
Regulación de carga mejor que 2,5% (2% típico)
Regulación de línea mejor que 0,04% (típico 0,01%) para una variación del 10% en la entrada
Salida 15VCC
+/- 2%
1,5A
Ripple menor que 400mV
Regulación de carga mejor que 2,5% (2% típico)
Regulación de línea mejor que 0,04% (típico 0,01%) para una variación del 10% en la entrada
Salida -15VCC
1,5A
Ripple menor que 400mV
Regulación de carga mejor que 2,5% (2% típico)
Regulación de línea mejor que 0,04% (típico 0,01%) para una variación del 10% en la entrada
Entrada admisibles: 100 a 260 VCA
Las salidas están protegidas contra sobrecargas, cortocircuitos, inyección externa de tensiones directas e inversas a través de diodos de flywheel y SCR de crowbar (cortorcircuito a masa)
¡Garantía Extendida 2 años!
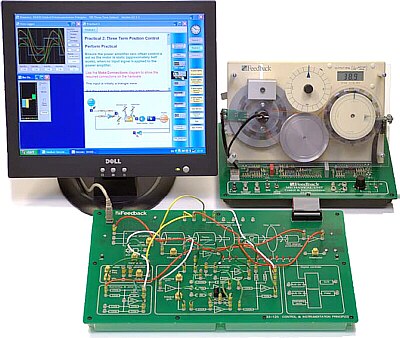
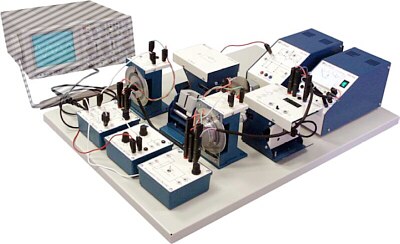
Sistema de enseñanza completo (sólo necesita una PC con un puerto USB libre) para estudiar:
Familiarización con un servosistema
Características de los amplificadores operacionales
Características de motor, tacogenerador y freno
Sistemas sencillos de control de velocidad
Canal de error y polaridad de la realimentación
Influencia de la ganancia
Realimentación de velocidad
Error de seguimiento del sistema
Sistema inestable
Sistema de control de velocidad
Introducción al control de 3 términos
Aplicaciones del control de 3 términos
Circuitos de control con un amplificador
Realimentación del transitorio de velocidad y feedforward derivativo
Principios de respuesta en frecuencia
Aplicaciones de la respuesta en frecuencia del sistema
Conversión A/D y D/A
Control del motor
Sensores potenciométricos de posición
Codificadores digitales
Codificador absoluto Gray
Codificador incremental
Codificación de la velocidad y dirección
Control de posición usando un sensor analógico
Control de posición usando un sensor digital
Control de velocidad usando un sensor analógico
Control de velocidad usando un sensor digital
Control de posición P+D
Control de posición P+I
Control de posición PID
Alimentación:
Este equipo precisa ser alimentado con +15V 1,5A, -15V 1,5A y +5V 500mA a través de fichas banana de 4 mm
Complemento indispensable requerido
Software operativo, didáctico y de instrumentación virtual ESPIAL 93-420
¡Garantía Extendida 2 años!
Constitución
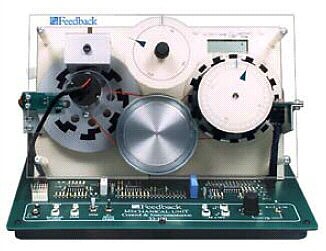
Fundamentos de Servomecanismos: Unidad Mecánica 33-100
Fundamentos de Servomecanismos: Unidad de Control Analógico y Digital 33-125
Para conectar a una unidad de control
analógico ,
digital o
dual
Incluye:
En la imagen inferior se observa un diagrama de los componentes de la unidad mecánica
¡Garantía Extendida 2 años!
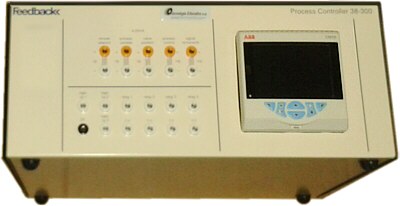
Placa de control analógico y digital con diagrama de bloques serigrafiado.
Incluye:
Amplificador de error c/4 entradas
Controlador PID con ajustes independientes de las 3 bandas
Integrador c/doble base de tiempo
Display LCD (para mostrar las señales de los encoders)
Microprocesador embebido, con múltiples algoritmos de control precargados
2 conversores A/D c/propósitos de control
4 conversores A/D c/propósitos de instrumentación
2 conversores D/A con salida continua y PWM
Generador de funciones (senoidal, triangular y cuadrada) c/barrido entre 0,1 y 5 Hz
2 atenuadores
Salida de CC c/nivel ajustable
¡Garantía Extendida 2 años!
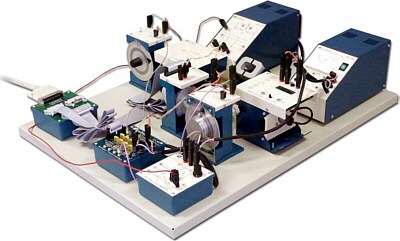
Conjunto de módulos dedicados al estudio avanzado de los sistemas de servocontrol con corriente continua, con conexión a MatLab.
Requiere:
PC
Matlab 7 1 o posterior
Simulink
Real Time Workshop
Real Time Widows Target
Control Slp Toolbox
PC con un slot PCI full size libre
¡Garantía Extendida 2 años!
Constitución
Sistema modular de servos de continua MS150
Conjunto p/vincular nuestros sistemas modulares de estudio de servomecanismos c/MatLab 33-310-PCI
Conjunto de módulos dedicados al estudio avanzado de los sistemas de servocontrol con corriente continua, abordando:
Amplificadores operacionales
Características de velocidad del motor
Canal de error de continua
Sistemas de control de posición
Control de posición a lazo cerrado
Sistema sencillo de control de velocidad
Zona muerta y sobrepasamiento
Realimentación de velocidad
Análisis de un control sencillo de posición.
Respuesta de velocidad
Respuesta de posición
Respuesta en frecuencia a lazo cerrado
Medición del error de velocidad Kv
Respuesta en frecuncia y respuesta transitoria
Medición del error de seguimiento
Consideraciones de estabilidad y el uso de redes combinadas de atraso/adelanto
Realimentación con tacogenerador y sus efectos en las características del sistema, incluyendo la realimentación de aceleración
Linealización del sistema
¡Garantía Extendida 2 años!
Constitución
Módulo p/servocontrol: atenuador AU150B
Módulo p/servocontrol: motor CC DCM150F
Módulo p/servocontrol: reductor y tacómetro GT150X
Módulo p/servocontrol: potenciómetro de set point IP150H
Módulo p/servocontrol: carga mecánica LU150L
Módulo p/servocontrol: conjunto de accesorios vs MS150Z
Módulo p/servocontrol: potenciómetro de posición OP150K
Módulo p/servocontrol: amplificador operacional OU150A
Módulo p/servocontrol: preamplificador PA150C
Módulo p/servocontrol: alimentación de baja tensión PS150E
Módulo p/servocontrol: servoamplificador SA150D
Compatible con los sistemas modulares de la familia MS150
Incluye:
Encoder digital montado en base magnética
Interfase externa de control
Placa PCI
Drivers
¡Garantía Extendida 2 años!
Muy adecuado para enseñar principios de técnicas de servocontrol en carreras de grado
Arquitectura abierta que admite la creación y prueba de controles propietarios
Compatible de forma nativa con LabVIEW, MATLAB/Simulink y sistemas embebidos en my Rio y otros dispositivos similares
Incluye:
Motor de CC tipo brushless, Vn=18 V, In=540 mA, 4050 rpm
Disco inercial de 54 g
Péndulo físico de 100 g
Encoder óptico de alta resolución (512 pulsos/revolución)
Amplificador lineal de tensión, con sensores integrados de corriente y tacómetro
Adquisidor de datos (DAQ)
Interfase flexible QFLEX 2 con conexiones USB y SPI/Qbus
LED tricolor programable
Modelos y parámetros completamente documentados para LabVIEW y MATLAB/Simulink
Ejemplos de programación y hojas de datos del microcontrolador utilizado internamente
Acceso libre al foro www.QuanserShare.com
Temas habitualmente abordados con el disco de inercia:
Familiarización
Modelización de la respuesta al escalón
Ruido de medición y fitrado
Modelización electromecánica
Sistemas de segundo orden
Control PD
Análisis de estabilidad
Temas habitualmente abordados con el péndulo:
Momento de inercia
Pendulación controlada (modo puente grúa)
Control de elevación y balanceo (modo péndulo invertido)
Control basado en LQR
Modelización en el espacio de estados
Constitución:
Panel de interfase QFLEX 2 USB
Amplificador embebido
Módulos de disco inercial y péndulo
Manual de usuario (en Inglés, en formato electrónico)
Compatible con otros paneles QFLEX 2 que se pueden adquirir por separado
Dimensiones: 10,2 x 10,2 x 11.7 cm
Peso neto: 1,2 kg
Complementos requeridos:
Para funcionar con LabVIEW: LabVIEW propiamente dicho
Para funcionar con MATLAB/Simulink: Licencia de QUARC for Windows
Para funcionar con el controlador embebido: Un micro como Arduino o Raspberry Pi
Recursos on line
Presentación de producto
Demo con dos de estas unidades conectadas a través de IOT
Ideal para estudios avanzados de control, trabajos de proyecto y vaildación de trabajos de investigación
Robusto, preciso y confiable
Reconfigurable, permite modelizar varios sistemas aeroespaciales:
Helicóptero con 1 y 2 grados de libertad
Medio cuadrurotor
Arquitectura abierta que admite la creación y prueba de controles propietarios
Compatible de forma nativa con LabVIEW, MATLAB/Simulink y sistemas embebidos en my Rio y otros dispositivos similares
Incluye:
Motor de CC sin núcleo, con enconder
Guiñada de 360 grados, sin límite de giro (no hay cables que se enrosquen) con encoder óptico de muy alta resolución (1024 pulsos/revolución)
Cabeceo de +-62 grados con respecto a la horizontal cuando se monta como medio cuadrurotor, con encoder óptico de alta resolución (512 pulsos/revolución)
Giróscopo y acelerómetro de 3 ejes incorporados
2 rotores de 12,7 cm, con aspas intercambiables y guarda de seguridad
Amplificador lineal de tensión, con sensores integrados de corriente y tacómetro
Adquisidor de datos (DAQ)
Interfase flexible QFLEX 2 con conexiones USB y SPI/Qbus
LED tricolor programable
Modelos y parámetros completamente documentados para LabVIEW y MATLAB/Simulink
Ejemplos de programación y hojas de datos del microcontrolador utilizado internamente
Acceso libre al foro www.QuanserShare.com
Temas habitualmente abordados con 1 grado de libertad
Familiarización
Control de velocidad del rotor
Configuración de actitud con 1 grado de libertad
Control PID
Introducción al IMU
Modelización y validación de modelo usando función de transferencia
Caracterización del sistema
Ajuste de ganancia
Temas habitualmente abordados con 2 grados de libertad:
Modelización
Represenatción de estado en espacio lineal
Control por realimentación de estado
Dinámica acoplada
Temas habitualmente abordados con la configuración de medio cuadrurotor:
Modelización
Control simple de guiñada
Filtro de Kalman
Constitución:
Base con columna y rotores
Amplificador embebido
Panel de control QFLEX2
Manual de usuario (en Inglés, en formato electrónico)
Compatible con otros paneles QFLEX 2 que se pueden adquirir por separado
Dimensiones de la base: 17.8 x 17.8 x 7 cm
Espacio requerido por el dispositivo móvil: 35,6 (h) x 51 (dia) cm
Peso neto: 3,6 kg
Complementos requeridos:
Para funcionar con LabVIEW: LabVIEW propiamente dicho
Para funcionar con MATLAB/Simulink: Licencia de QUARC for Windows
Para funcionar con el controlador embebido: Un micro como Arduino o Raspberry Pi
Recursos on line
Presentación del producto
Permite desarrollar e implementar rápidamente sistemas de control para dispositivos Quanser bajo el entorno de MATLAB/Simulink
Alta performance en tiempo real sobre objetos tales como QNX
Permite ajustar los parámetros directemte desde los diagramas de Simulink
Permite aprovechar las rutinas de ploteo, realidad virtual y otras capacidades avanzadas de Simulink
Modelos multi-hilo y multi-rate
Generación de código para múltiples objetivos desde un único diagrama de Simulink
Ejecución y conexión simultánea de múltiples modelos a un mismo objetivo en tiempo concurrente
Compilación incremental para grandes sistemas a través de la referencia de modelo
Permite reconfigurar dinámicamente un sistema en ejecución desde un modelo supervisor de Simulink
Soporte de hilos asíncronos de procesamiento
Por favor revise la documentación on-line del desarrollador para asegurarse de que su hardware y software serán compatibles
Recursos on line
Presentación de producto
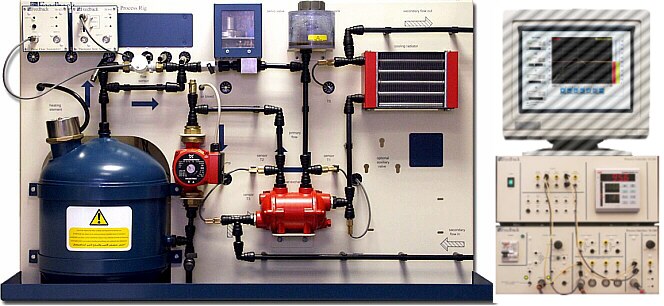
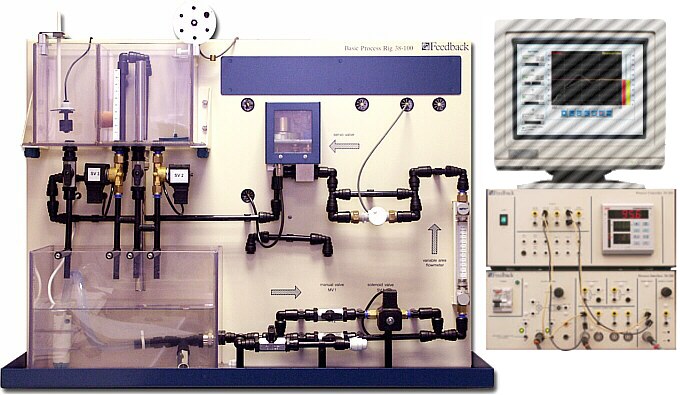
Planta dedicada al estudio de técnicas de control de procesos industriales
Requiere:
PC corriendo bajo Windows, con un puerto de red libre o alternativamente un switch a través del cual se pueda conectar en red a la PC en cuestión con el controlador de la planta de procesos
Plataforma de software ESPIAL 93-420 sobre la que se carga los contenidos electrónicos provistos con este sistema y que se encarga de la comunicación entre equipos. Sólo se requiere una licencia de ESPIAL por PC, sin importar el número de paquetes y equipos específicos que se monten sobre ella
¡Garantía Extendida 2 años!
Prácticas referidas al control de nivel
Calibración del sensor de nivel y su circuito de acondicionamiento.
Control manual del nivel en el tanque de procesos
con ajuste on/off del flujo hacia y desde el tanque
con ajuste proporcional del flujo hacia y desde el tanque
determinación de la respuesta del sistema para cada uno de los dos casos anteriores
Control on/off del nivel del tanque de procesos usando un interruptor por nivel alto/bajo
con válvula solenoide normalmente abierta sobre la entrada
con válvula normalmente cerrada sobre la salida
introducción de histéresis para reducir la vibración de la válvula
Control on/off de nivel usando un sensor de nivel con un controlador on/off y salida a relé
a válvula solenoide normalmente abierta (entrada)
a válvula solenoide normalmente cerrada (salida)
ajuste remoto del punto de trabajo
efectos de la zona muerta
Control de nivel usando un sensor de nivel y un controlador con:
salida de ciclo de trabajo variable a una válvula solenoide normalmente abierta (entrada)
salida de ciclo de trabajo variable a una válvula solenoide normalmente cerrada (salida)
Salida proporcional a una válvula de control motorizada (entrada)
Respuesta de un controlador proporcional a un cambio en el punto de trabajo
Respuesta de un controlador proporcional + integral a un cambio en el punto de trabajo
Efecto del cambio del volúmen del tanque de procesos en la respuesta del sistema
Procedimientos para optimizar el ajuste de un controlador de 3 términos para adaptarse al proceso
Prácticas referidas al control de caudal
Calibración de un sensor de caudal y su circuito de acondicionamiento
Control manual del flujo en el circuito utilizando una válvula motorizada
Determinación de la respuesta del sistema
Demostración de la inutilidad del control on/off para el control del flujo
Control del flujo usando un sensor de caudal y un controlador con salida proporcional conectada a una válvula motorizada
Procedimientos para optimizar el ajuste de un controlador de 3 términos para adaptarse al proceso
Constitución
Planta para la Enseñanza de Control de Procesos con control de nivel y caudal 38-100
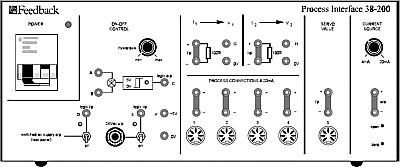
Interfase de proceso 38-200
Controlador de procesos (digital de 3 términos) 38-300
Conjunto para la medición de nivel 38-400
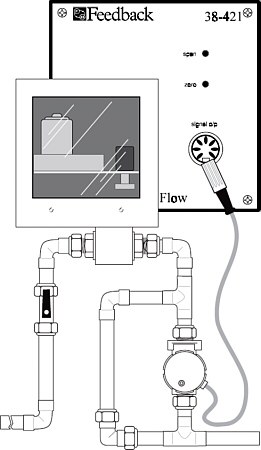
Conjunto para la medición de caudal 38-420
Módulo de display digital p/4-20 mA 38-490
Paquete de software Discovery para nivel/caudal y temperatura 38-901M
Esta planta forma parte de varios conjuntos, p. ej: 38-001 , 38-003 , 38-009 y 38-010
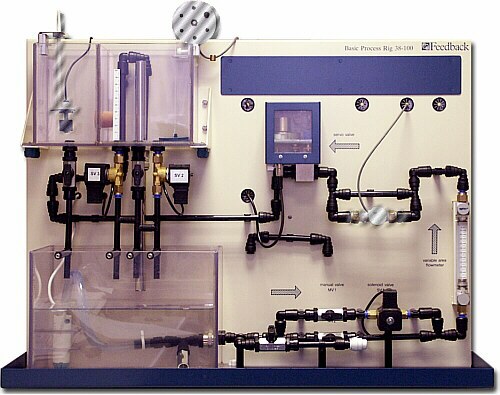
Incluye:
Tanque de reserva de agua
Tanque de proceso de 2 + 3 litros, dividido en 2 secciones por un tabique, con un agujero en la parte inferior que permite hacerlas solidarias
Descarga de rebalse para tanque de producto
Bomba centrífuga sumergida, 16 litros/min
Rotámetro (para lectura visual del caudal) 0,4 a 4,4 litros/min
Servoválvula motorizada, con control 4-20 mA
3 válvulas solenoide de 24V
4 llaves de paso manuales
El circuito hidráulico es reconfigurable permite a los usuarios insertar otros elementos en el camino, tales como:
Caudalímetro
Sensores de nivel ON/OFF proporcionales
etc
¡Garantía Extendida 2 años!
Unidad de servicios comunes para las plantas de la famila Procon Feedback 38-xxx.
Incluye:
Alimentación de baja tensión para sensores, acondicionadores y actuadores
Comparador con histérisis variable, rango de entrada: 0-5V
Buffer con entrada lógica, salida de potencia de 24V y override manual
Buffer con entrada lógica, salida por relé para dispositivos externos y override manual
Alimentación y tratamiento de señales para 4 dispositivos de entrada 4-20 mA
Alimentación y salida de señal 4-20 mA para control de servoválvula compatible
2 conversores corriente (4 a 20 mA) a tensión a través de resistor de carga de 100 Ohm
Fuente de corriente regulable 4-20 mA para generar set-points o simular el ingreso de una señal de sensor
Pachera de conexión con fichas banana hembra de 4 mm
¡Garantía Extendida 2 años!
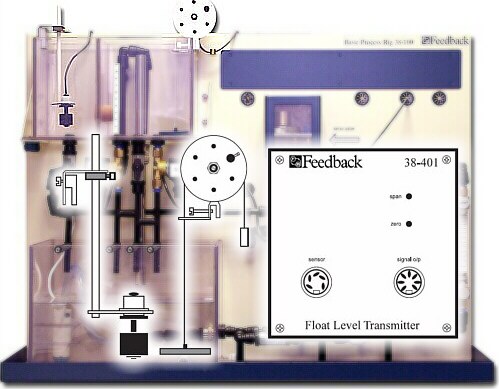
Se monta sobre la planta 38-100
Toma su alimentacion de la interfase de procesos 38-200
Incluye:
Sensor de nivel ON/OFF con altura ajustable
Sensor de nivel proporcional, con flotador, polea y potenciómetro multivuelta industrial
Caja acondicionadora de señal con base mangética, salidas lógica p/el medidor ON/OFF y salida 4-20 mA p/el medidor proporcional
¡Garantía Extendida 2 años!
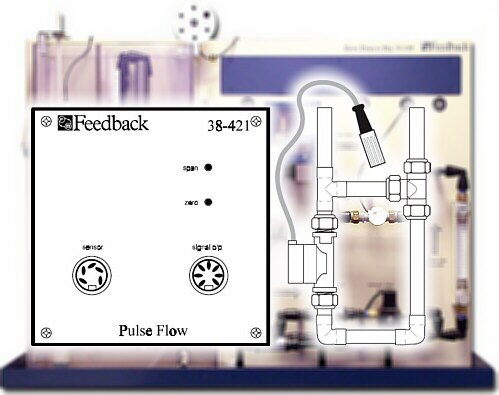
Se monta sobre la planta 38-100
Toma su alimentacion de la interfase de procesos 38-200
Incluye:
Turbina medidora de caudal 0-4,5 litros/min
Caja acondicionadora de señal con base magnética y salida 4-20 mA
¡Garantía Extendida 2 años!
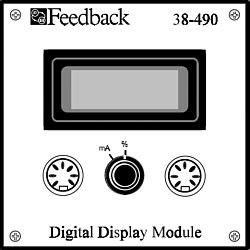
Se inserta en el camino de las señales 4-20 mA de cualquiera de los sensores o actuadores compatibles de la serie Procon 38-xxx de Feedback
Muestra en un display LCD uno de los dos valores siguientes:
Toma su alimentacion de la interfase de procesos 38-200
Base con montura magnétic
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
Planta dedicada al estudio de técnicas de control de procesos industriales (requiere una PC corriendo bajo Windows)
Requiere:
PC corriendo bajo Windows, con un puerto de red libre o alternativamente un switch a través del cual se pueda conectar en red a la PC en cuestión con el controlador de la planta de procesos
Plataforma de software ESPIAL 93-420 sobre la que se carga los contenidos electrónicos provistos con este sistema y que se encarga de la comunicación entre equipos. Sólo se requiere una licencia de ESPIAL por PC, sin importar el número de paquetes y equipos específicos que se monten sobre ella
¡Garantía Extendida 2 años!
Temática abordada
Calibración de los sensores de temperatura y sus acondicionadores de señal
Calibración de la temperatura accionando:
El calefactor y la bomba
La válvula de control sobre la línea del fluido calefactor o el de procesos
Determinación de la respuesta del sistema para los dos casos anteriores
Control de temperatura on/off usando un sensor de temperatura o un termointerruptor, junto a un controlador on/off con relé para activar:
Calefactor
Bomba del circuito calefactor
Control proporcional usando un sensor de temperatura con un controlador de 3 términos y salida proporcional:
A través de un relé, variando el ciclo de trabajo del calefactor
A válvula motorizada
Procedimientos para optimizar el ajuste de un controlador de 3 términos de acuerdo al proceso.
Constitución
Interfase de proceso 38-200
Controlador de procesos (digital de 3 términos) 38-300
Conjunto auxiliar de control de temperatura (p/usar c/38-300 y 38-600) 38-480
Módulo de display digital p/4-20 mA 38-490
Planta de proceso p/temperatura (requiere 38-440, 38-200 y 38-300) 38-600
Paquete de software Discovery para nivel/caudal y temperatura 38-901M
Unidad de servicios comunes para las plantas de la famila Procon Feedback 38-xxx.
Incluye:
Alimentación de baja tensión para sensores, acondicionadores y actuadores
Comparador con histérisis variable, rango de entrada: 0-5V
Buffer con entrada lógica, salida de potencia de 24V y override manual
Buffer con entrada lógica, salida por relé para dispositivos externos y override manual
Alimentación y tratamiento de señales para 4 dispositivos de entrada 4-20 mA
Alimentación y salida de señal 4-20 mA para control de servoválvula compatible
2 conversores corriente (4 a 20 mA) a tensión a través de resistor de carga de 100 Ohm
Fuente de corriente regulable 4-20 mA para generar set-points o simular el ingreso de una señal de sensor
Pachera de conexión con fichas banana hembra de 4 mm
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
Se inserta en el camino de las señales 4-20 mA de cualquiera de los sensores o actuadores compatibles de la serie Procon 38-xxx de Feedback
Muestra en un display LCD uno de los dos valores siguientes:
Toma su alimentacion de la interfase de procesos 38-200
Base con montura magnétic
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
Planta dedicada al estudio de técnicas de control de procesos industriales (requiere una PC corriendo bajo Windows)
Requiere:
PC corriendo bajo Windows, con un puerto de red libre o alternativamente un switch a través del cual se pueda conectar en red a la PC en cuestión con el controlador de la planta de procesos
Plataforma de software ESPIAL 93-420 sobre la que se carga los contenidos electrónicos provistos con este sistema y que se encarga de la comunicación entre equipos. Sólo se requiere una licencia de ESPIAL por PC, sin importar el número de paquetes y equipos específicos que se monten sobre ella
¡Garantía Extendida 2 años!
Constitución
Planta para la Enseñanza de Control de Procesos con control de nivel y caudal 38-100
2 x Interfase de proceso 38-200
2 x Controlador de procesos (digital de 3 términos) 38-300
Conjunto para la medición de nivel 38-400
Conjunto para la medición de caudal 38-420
2 x Módulo de display digital p/4-20 mA 38-490
Planta de proceso p/temperatura (requiere 38-440, 38-200 y 38-300) 38-600
Paquete de software Discovery para nivel/caudal y temperatura 38-901M
Esta planta forma parte de varios conjuntos, p. ej: 38-001 , 38-003 , 38-009 y 38-010
Incluye:
Tanque de reserva de agua
Tanque de proceso de 2 + 3 litros, dividido en 2 secciones por un tabique, con un agujero en la parte inferior que permite hacerlas solidarias
Descarga de rebalse para tanque de producto
Bomba centrífuga sumergida, 16 litros/min
Rotámetro (para lectura visual del caudal) 0,4 a 4,4 litros/min
Servoválvula motorizada, con control 4-20 mA
3 válvulas solenoide de 24V
4 llaves de paso manuales
El circuito hidráulico es reconfigurable permite a los usuarios insertar otros elementos en el camino, tales como:
Caudalímetro
Sensores de nivel ON/OFF proporcionales
etc
¡Garantía Extendida 2 años!
Unidad de servicios comunes para las plantas de la famila Procon Feedback 38-xxx.
Incluye:
Alimentación de baja tensión para sensores, acondicionadores y actuadores
Comparador con histérisis variable, rango de entrada: 0-5V
Buffer con entrada lógica, salida de potencia de 24V y override manual
Buffer con entrada lógica, salida por relé para dispositivos externos y override manual
Alimentación y tratamiento de señales para 4 dispositivos de entrada 4-20 mA
Alimentación y salida de señal 4-20 mA para control de servoválvula compatible
2 conversores corriente (4 a 20 mA) a tensión a través de resistor de carga de 100 Ohm
Fuente de corriente regulable 4-20 mA para generar set-points o simular el ingreso de una señal de sensor
Pachera de conexión con fichas banana hembra de 4 mm
¡Garantía Extendida 2 años!
Se monta sobre la planta 38-100
Toma su alimentacion de la interfase de procesos 38-200
Incluye:
Sensor de nivel ON/OFF con altura ajustable
Sensor de nivel proporcional, con flotador, polea y potenciómetro multivuelta industrial
Caja acondicionadora de señal con base mangética, salidas lógica p/el medidor ON/OFF y salida 4-20 mA p/el medidor proporcional
¡Garantía Extendida 2 años!
Se monta sobre la planta 38-100
Toma su alimentacion de la interfase de procesos 38-200
Incluye:
Turbina medidora de caudal 0-4,5 litros/min
Caja acondicionadora de señal con base magnética y salida 4-20 mA
¡Garantía Extendida 2 años!
Se inserta en el camino de las señales 4-20 mA de cualquiera de los sensores o actuadores compatibles de la serie Procon 38-xxx de Feedback
Muestra en un display LCD uno de los dos valores siguientes:
Toma su alimentacion de la interfase de procesos 38-200
Base con montura magnétic
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
Planta dedicada al estudio de técnicas de control de procesos industriales (requiere una PC corriendo bajo Windows)
Requiere:
PC corriendo bajo Windows, con un puerto de red libre o alternativamente un switch a través del cual se pueda conectar en red a la PC en cuestión con el controlador de la planta de procesos
Plataforma de software ESPIAL 93-420 sobre la que se carga los contenidos electrónicos provistos con este sistema y que se encarga de la comunicación entre equipos. Sólo se requiere una licencia de ESPIAL por PC, sin importar el número de paquetes y equipos específicos que se monten sobre ella
¡Garantía Extendida 2 años!
Servicio requerido
Fuente de aire comprimido, filtrada y regulada
Constitución
Interfase de proceso 38-200
Controlador de procesos (digital de 3 términos) 38-300
Módulo de display digital p/4-20 mA 38-490
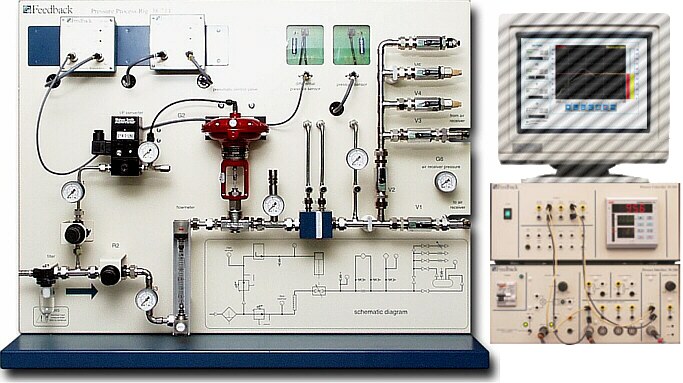
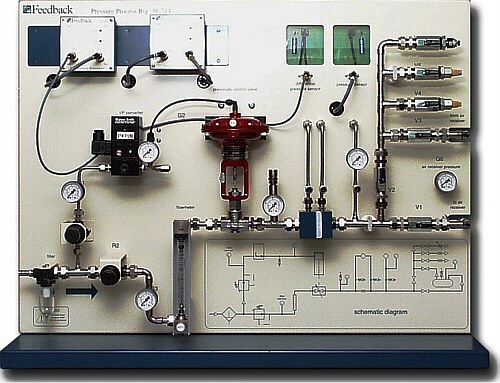
Planta de control de presión (requiere 38-200 y 38-300) 38-714
Paquete de software "Discovery" para Presión 38-930M
Unidad de servicios comunes para las plantas de la famila Procon Feedback 38-xxx.
Incluye:
Alimentación de baja tensión para sensores, acondicionadores y actuadores
Comparador con histérisis variable, rango de entrada: 0-5V
Buffer con entrada lógica, salida de potencia de 24V y override manual
Buffer con entrada lógica, salida por relé para dispositivos externos y override manual
Alimentación y tratamiento de señales para 4 dispositivos de entrada 4-20 mA
Alimentación y salida de señal 4-20 mA para control de servoválvula compatible
2 conversores corriente (4 a 20 mA) a tensión a través de resistor de carga de 100 Ohm
Fuente de corriente regulable 4-20 mA para generar set-points o simular el ingreso de una señal de sensor
Pachera de conexión con fichas banana hembra de 4 mm
¡Garantía Extendida 2 años!
Se inserta en el camino de las señales 4-20 mA de cualquiera de los sensores o actuadores compatibles de la serie Procon 38-xxx de Feedback
Muestra en un display LCD uno de los dos valores siguientes:
Toma su alimentacion de la interfase de procesos 38-200
Base con montura magnétic
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
¡Garantía Extendida 2 años!
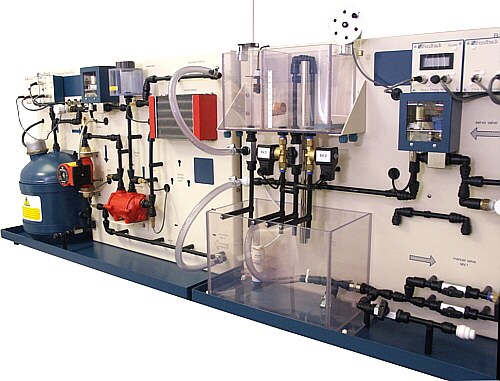
Modelo a escala de una planta química industrial con tanques acoplados en la que se debe controlar simultáneamente el nivel de c/tanque:
4 tanques traslúcidos que se hacen trabajar con agua
Sensores de presión p/determinar el nivel de c/tanque
2 bombas sumergidas con control independiente
7 válvulas manuales p/configurar distintas comunicaciones entre los tanques
4 válvulas manuales p/introducir perturbaciones
Juegos de tapones con orificios de distintos calibres p/cambiar los regímenes de descarga
Bastidor de acero
Manual para el alumno (en idioma Inglés) con información del comportamiento físico del sistema y una serie de experiencias de control sugeridas
Control
El usuario puede usar los modelos provistos con el sistema o construir los suyos propios
Los algoritmos se desarrollan, prueban en los modelos e implementan en tiempo real
Las variables de proceso se pueden observar como gráficos en pantalla a través de MatLab
Constitución del sistema
Planta con tanques acoplados
Drivers y módulos de comunicación con Simulink-MatLab
Placa de interfase Advantech PCI 1711
Temas incluidos en el manual
Modelización de sistemas con tanques acoplados
Linealización del modelo
Identificación de model de tanques acoplados
Control de tanques acoplados
Control de planta
Control de nivel en tanque 1 o tanque 2
Control simultáneo de 2 tanques
Control cruzado
Compensación de perturbaciones
El usuario debe contar con una PC corriendo MatLab v7 o posterior y Simulink
¡Garantía Extendida 2 años!
Temas y equipos directamente relacionados
Equipos Didácticos para la Enseñanza de Electricidad y Electrónica

 Sistemas completos y módulos individuales dedicados al estudio de las características de diversos transductores, el acondicionamiento de las señales que producen y varias de sus aplicaciones prácticas
Sistemas completos y módulos individuales dedicados al estudio de las características de diversos transductores, el acondicionamiento de las señales que producen y varias de sus aplicaciones prácticas
 Sobre esta unidad se montan todas las placas de la familia COM3Lab
Sobre esta unidad se montan todas las placas de la familia COM3Lab


 Sistema de enseñanza completo (sólo necesita una PC con un puerto USB libre) para estudiar:
Sistema de enseñanza completo (sólo necesita una PC con un puerto USB libre) para estudiar:
 Para conectar a una unidad de control
Para conectar a una unidad de control 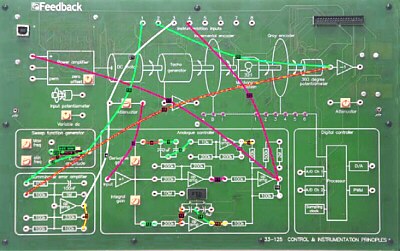 Placa de control analógico y digital con diagrama de bloques serigrafiado.
Placa de control analógico y digital con diagrama de bloques serigrafiado.
 Conjunto de módulos dedicados al estudio avanzado de los sistemas de servocontrol con corriente continua, con conexión a MatLab.
Conjunto de módulos dedicados al estudio avanzado de los sistemas de servocontrol con corriente continua, con conexión a MatLab.
 Conjunto de módulos dedicados al estudio avanzado de los sistemas de servocontrol con corriente continua, abordando:
Conjunto de módulos dedicados al estudio avanzado de los sistemas de servocontrol con corriente continua, abordando:

 Video en YouTube
Video en YouTube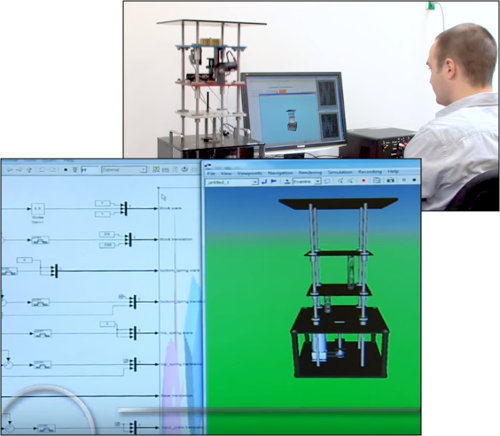
 Incluye
Incluye