
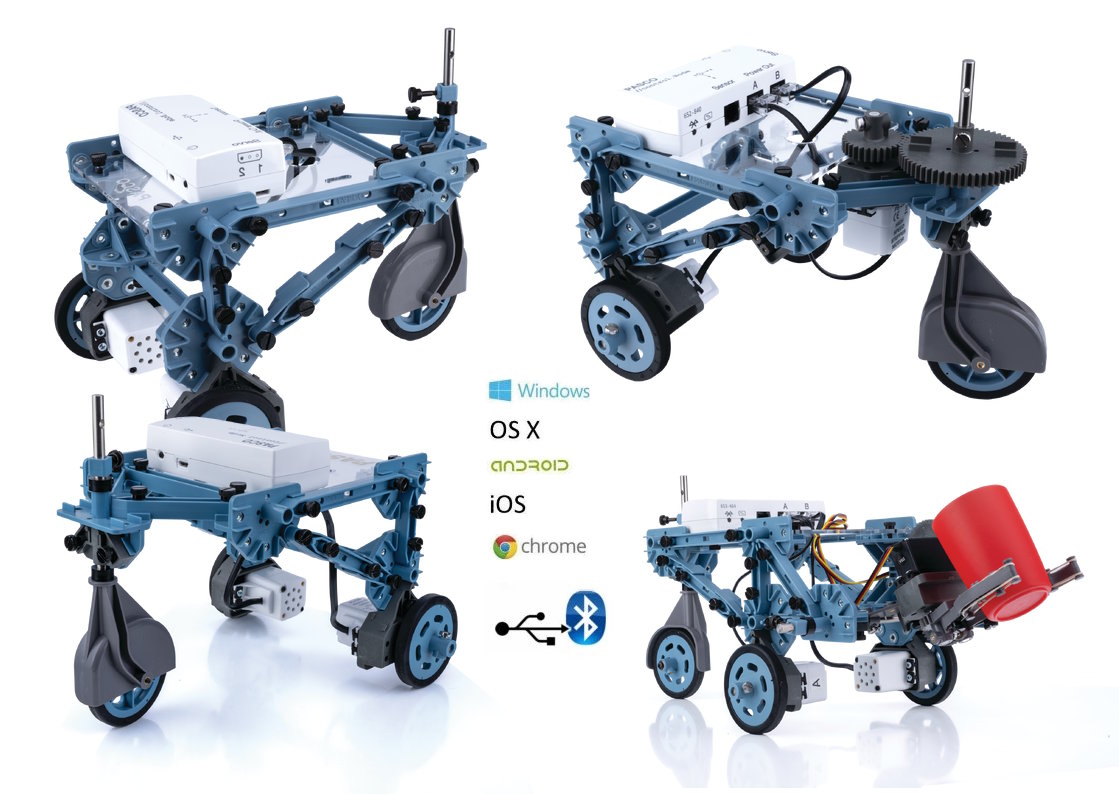
 Este robot versátil está construido con componentes de PASCO Structures, lo que permite a los estudiantes construir varias configuraciones diferentes del StructureBOT (dirección en las ruedas delanteras, dirección en las ruedas traseras, con y sin mano/gripper)
Este robot versátil está construido con componentes de PASCO Structures, lo que permite a los estudiantes construir varias configuraciones diferentes del StructureBOT (dirección en las ruedas delanteras, dirección en las ruedas traseras, con y sin mano/gripper)

- Puede navegar a través de un laberinto, girar en círculos y recoger objetos con su pinza
- Archivos con instrucciones detalladas guían a losl estudiantes en la construcción del StructureBOT y en el aprendizaje de las técnicas de programación con Blockly embebida en los software Capstone y SparkVue
- Tiene una gran ventaja sobre otros kits de robots convencionales: dado que la codificación Blockly está embebida en los paquetes de adquisición y procsamiento de datos para Ciencias Naturales, con herramientas que exceden largamente los requerimientos de los programas que se dedican solo a la automatización, pueden tomar, procesar y mostrar información muy variada, tomando comlo más básico el monitoreo de la posición y velocidad de los motores paso a paso BOT en un gráfico en tiempo real
- También pueden ver las variables de salida de su código en pantallas digitales para poder asociar qué movimiento está realizando el BOT con secciones de su código, ayudándoles en los procesos de debugging
Características principales
- Múltiples configuraciones: con y sin pinza, dos ruedas o tres ruedas, dirección en las ruedas delanteras o dirección doble en las ruedas traseras
- Capacidad de ampliación: agregue otros componentes de PASCO Structures para cambiar el diseño de StructureBOT
- Capacidad de ampliación: agregue otros sensores PASCO para ampliar las capacidades del bot
Trabajos prácticos previstos en el material de apoyo
- Armar la estructura del BOT
- Mover el robot hacia adelante y hacia atrás
- Hacer girar al robot
- Uso de la dirección asistida de la rueda delantera
- Mover objetos con el gripper/mano
- Ir a un lugar y regresar
- Navegar por un laberinto
- Girar en círculo
- Crear una función a medida
Exploración adicional
- Agregar un sensor de movimiento inalámbrico para evitar obstáculos
- Agregar dos sensores de luz para seguir una línea
- Agregar un //code.Node: dispositivo para aprender robótica, programación y desarrollar el pensamiento computacional en entorno STEM PS-3231 para dirigir el robot
- Agregar un //code.Node para señales de giro
- Agregar un Módulo con membrana de repuesto para sonda ISE de Amonio+ PS-3548para clasificar objetos por sus colores
¿Cómo funciona?
- Los estudiantes utilizan PASCO Structures en este kit para construir el StructureBOT
- Se utilizan motores paso a paso y servomotores para mover el BOT y su gripper
- Los motores son alimentados y controlados por el Módulo //control.Node (salida de control) para proyectos ejecutados bajo CapStone y/o SparkVue PS-3232 (incluido)
- Los estudiantes programan el bot usando el módulo Blockly embebido en los software Capstone y SparkVue
- StructureBOT se puede conectar a una computadora de forma inalámbrica a través de Bluetooth o se puede cargar un código en el firmware del StructureBOT para que se ejecute de forma autónoma
-
Pedir Cotización
Peso Bruto: 1,63 kg