
 Forma parte del Conjunto de elementos de estructuras para armar un StructureBOT ME-7029 pero también se puede comprar por separado
Forma parte del Conjunto de elementos de estructuras para armar un StructureBOT ME-7029 pero también se puede comprar por separado
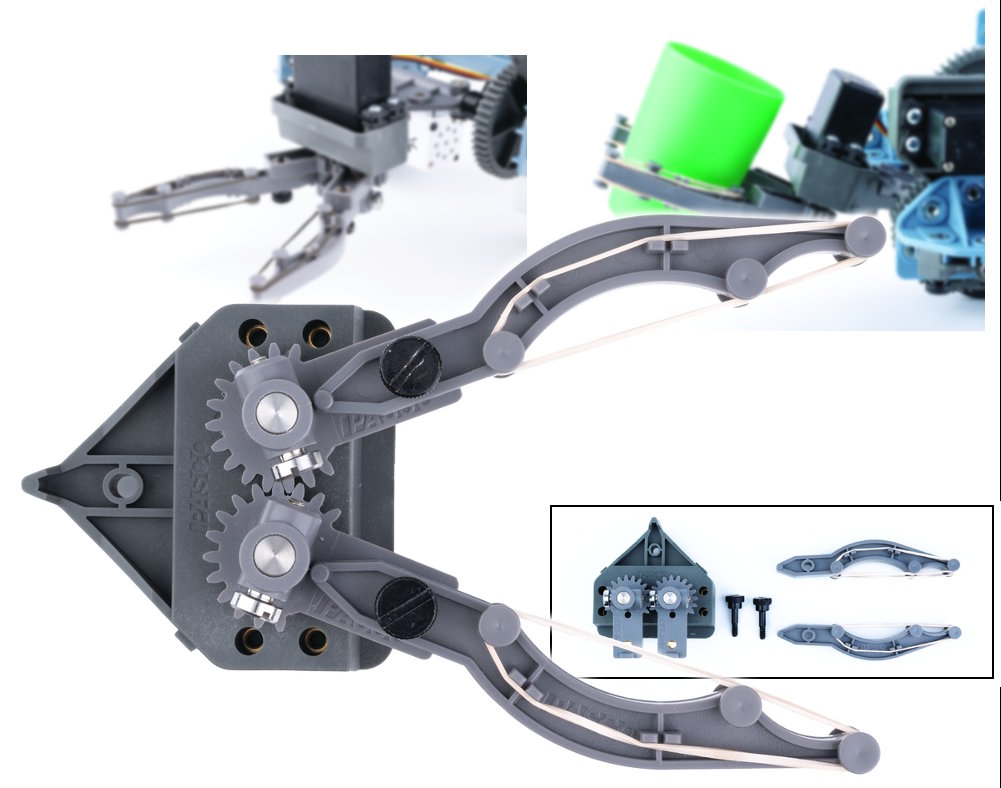
- Agregue esta pinza para tomar objetos
- Conecte un motor paso a paso o un servomotor a la pinza para accionar el engranaje que abre y cierra los brazos de la pinza
- Usa las mismas medidas de espiga y tornillos que el resto del sistema de Elementos de Estructuras, lo que facilita la fijación de la pinza a cualquier estructura PASCO existente
Características principales
- Compatible con el resto de la línea
- Las bandas elásticas añaden fricción al agarre
- Cuando se comanda usando un Módulo //control.Node (salida de control) para proyectos ejecutados bajo CapStone y/o SparkVue PS-3232 se puede detectar el aumento en la corriente del servo para que pueda saber cuándo la pinza se ha cerrado sobre un objeto
Incluye
- 2 dedos
- Soporte para servomotor (p. ej. SE-2975)
- 20 banditas elásticas
- 2 adaptadores de eje estriado
- 2 tornillos con retención
- 4 tornillos 4-40 para el servor
- 4 tornillos 6-32 para fijar los brazos de agarre al soporte del motor
-
Pedir Cotización
Peso Bruto: 0,09 kg