Ideal para estudios avanzados de control, trabajos de proyecto y vaildación de trabajos de investigación
Robusto, preciso y confiable
Reconfigurable, permite modelizar varios sistemas aeroespaciales:
Helicóptero con 1 y 2 grados de libertad
Medio cuadrurotor
Arquitectura abierta que admite la creación y prueba de controles propietarios
Compatible de forma nativa con LabVIEW, MATLAB/Simulink y sistemas embebidos en my Rio y otros dispositivos similares
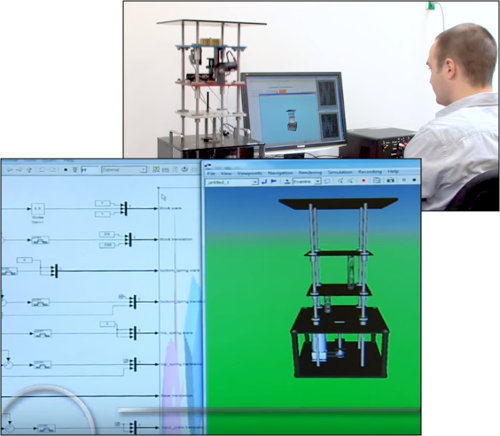
Incluye:
Motor de CC sin núcleo, con enconder
Guiñada de 360 grados, sin límite de giro (no hay cables que se enrosquen) con encoder óptico de muy alta resolución (1024 pulsos/revolución)
Cabeceo de +-62 grados con respecto a la horizontal cuando se monta como medio cuadrurotor, con encoder óptico de alta resolución (512 pulsos/revolución)
Giróscopo y acelerómetro de 3 ejes incorporados
2 rotores de 12,7 cm, con aspas intercambiables y guarda de seguridad
Amplificador lineal de tensión, con sensores integrados de corriente y tacómetro
Adquisidor de datos (DAQ)
Interfase flexible QFLEX 2 con conexiones USB y SPI/Qbus
LED tricolor programable
Modelos y parámetros completamente documentados para LabVIEW y MATLAB/Simulink
Ejemplos de programación y hojas de datos del microcontrolador utilizado internamente
Acceso libre al foro www.QuanserShare.com
Temas habitualmente abordados con 1 grado de libertad
Familiarización
Control de velocidad del rotor
Configuración de actitud con 1 grado de libertad
Control PID
Introducción al IMU
Modelización y validación de modelo usando función de transferencia
Caracterización del sistema
Ajuste de ganancia
Temas habitualmente abordados con 2 grados de libertad:
Modelización
Represenatción de estado en espacio lineal
Control por realimentación de estado
Dinámica acoplada
Temas habitualmente abordados con la configuración de medio cuadrurotor:
Modelización
Control simple de guiñada
Filtro de Kalman
Constitución:
Base con columna y rotores
Amplificador embebido
Panel de control QFLEX2
Manual de usuario (en Inglés, en formato electrónico)
Compatible con otros paneles QFLEX 2 que se pueden adquirir por separado
Dimensiones de la base: 17.8 x 17.8 x 7 cm
Espacio requerido por el dispositivo móvil: 35,6 (h) x 51 (dia) cm
Peso neto: 3,6 kg
Complementos requeridos:
Para funcionar con LabVIEW: LabVIEW propiamente dicho
Ideal para introducir conceptos y teorías de control básico en una plataforma intuitiva y fácil de usar
Se puede usar sólo o acompañado por otros módulos ampliando la temática de control cubierta
Las aplicaciones en el mundo real del servomotor giratorio incluyen la función de enfoque automático de cámaras, control de crucero en automóviles y control de velocidad en reproductores de CD
Incluye:
Servomotor de CC, 6V 1A 6000 rpm
Gabinete de alumino
Caja reductora con robustos engranajes metálicos
Encoder óptico en cuadratura, de alta resolución, montado sobre el engranaje de salida
Potenciómetro de giro continuo, montado también sobre el engranaje de salida. V excitación: +-12 V, V salida: +- 5 V
Tacómetro acoplado al eje del servomotor: 1,5 mV / rpm
Carga y relaciones de reducción ajustables
Compatible con una familia completa de módulos dedicados al servocontrol
Complementos requeridos para funcionar bajo LabVIEW:
Quanser Rapid Control Prototyping (Q-RCP) Toolkit
Amplificador lineal de voltaje Quanser VoltPAQ-X1
Alguno de estos dispositivos de E/S: NI CompactRIO c/Quanser Q1-cRIO ó myRIO 782692-01 c/Quanser Terminal Board 783474-01 ó Quanser Q2-USB ó Quanser Q8-USB ó Quanser QPIDe
Complementos requeridos para funcionar bajo MATLAB/Simulink:
QUARC add-on p/MATLAB/Simulink
Amplificador lineal de voltaje Quanser VoltPAQ-X1
Alguno de estos dispositivos de E/S: Quanser Q2-USB ó Quanser Q8-USB ó Quanser QPIDe

 Sistemas didácticos e instrumentos de medición específica para el área de control de servomecanismos
Sistemas didácticos e instrumentos de medición específica para el área de control de servomecanismos
 Video en YouTube
Video en YouTube