
 Láser
Láser
- Diodo de láser de 200 mW y 660 mn de estado sólido y refrigerado por aire (clase 3b).
- Sistema óptico estándar que produce una lámina luminosa de 3 mm de espesor y 45 grados (200 mm de anchura a 250 mm).
- Separación de impulsos (delta t) entre 100 micro s y 5 s (en incrementos de 10 micro s)
- Duración de impulso entre 10 micro s y 32 ms (en incrementos de 10 micro s).
Cámara
- Sensor CMOS VGA muy sensible
- 640 × 480, píxeles de 6,0 µm (formato de 85 mm);
- Aprox. 50% de eficacia de quántum a 660 nm
- Rango dinámico: 75 a 110 dB;
- Sensibilidad de 4,8 V/lux·seg.
- La entrada de activación permite sincronizar la obtención del par de imágenes con los eventos externos.
- Acople de ópticas con roscas CS y C
- Se incluye un objetivo de 12.5mm f/1.4
- La exposición de la cámara se puede sincronizar con los pulsos de laseo, por lo que es posible trabajar con luz ambiente normal
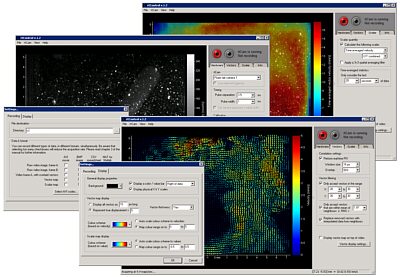
Procesamiento de software
- Velocidad de actualización y registro de datos hasta 16 Hz (depende de la velocidad del ordenador, los parámetros de adquisición y análisis PIV seleccionados y la grabación que se esté realizando)
- Cálculo de vectores de 2 componentes en tiempo real o fuera de línea.
- Correlación transversal de un solo paso o multipaso adaptativo con tamaños de ventana de 8, 12, 16, 24, 32 o 64 píxeles.
- Superposición de ventana del 0% o del 50% (es decir, mapas de hasta 19.000 vectores).
- Interpolación de vectores opcional y filtrado basado en:
- Límites de velocidad proporcionados por el usuario;
- RMS de valores de vectores adyacentes.
- Cálculo de los siguientes escalares derivados:
- Ángulo y magnitud de vector;
- Vorticidad y remolino
- Velocidad media por promedio de tiempo
- RMS e intensidad de turbulencia
- Donde corresponda, el componente de vector y el número de muestra estadística están definidos por el usuario.
-
Pedir Cotización
Peso Bruto: 6 kg
 El H41 consta de dos sistemas principales: el proyector de hoja de luz nanoLase y la cámara rtCam, con un sincronizador de temporización incorporado.
El H41 consta de dos sistemas principales: el proyector de hoja de luz nanoLase y la cámara rtCam, con un sincronizador de temporización incorporado.